
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
- 알고리즘
- 회귀
- c
- C++
- 프로그래밍
- C언어
- 리눅스
- 프로세스
- shell
- error
- 백준알고리즘
- 텐서플로우
- Windows 10
- 학습
- python
- 백준
- 공부
- 딥러닝
- CV
- Windows10
- 코딩
- 시스템프로그래밍
- 쉘
- linux
- TensorFlow
- 운영체제
- Computer Vision
- 턱걸이
- OpenCV
- 영상처리
- Today
- Total
줘이리의 인생적기
PCL & PCD 본문
Point Cloud는 센서(LiDAR, RGB-D)로 수집되는 데이터
이미지 데이터의 픽셀 위치 정보는 항상 양수, 왼쪽 위부터 기준점, 좌표값은 정수로 표현
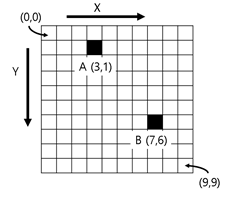
포인트 클라우드의 위치 정보는 양수 or 음수, 센서의 위치가 기준점, 좌표값은 실수로 표현
앞뒤는 x좌표, 좌우는 y좌표, 위아래는 z좌표
PCL(Point Cloud Library)는 Point Cloud 처리 라이브러리
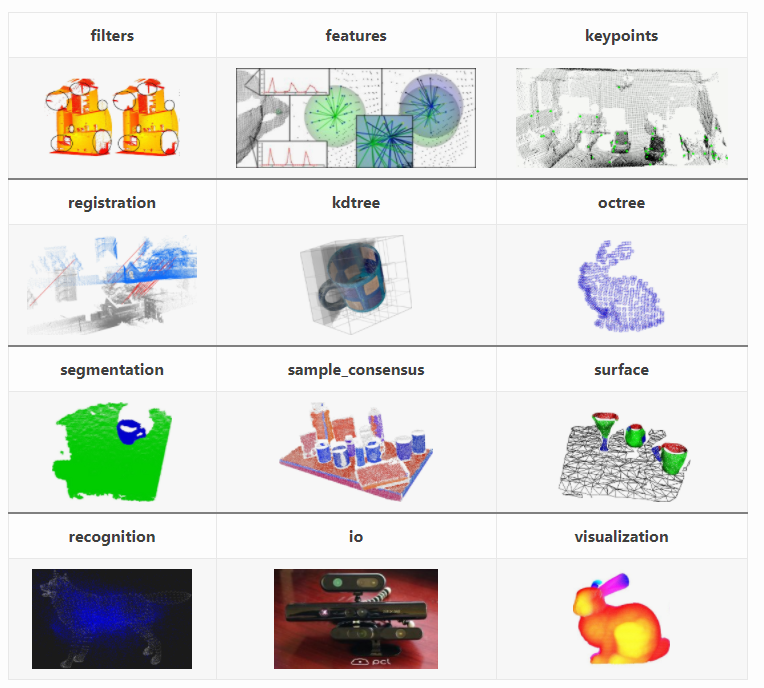
위와 같은 기능들을 제공한다
pointclouds.org/documentation/tutorials/#
Introduction — Point Cloud Library 1.11.1-dev documentation
Introduction The following links describe a set of basic PCL tutorials. Please note that their source codes may already be provided as part of the PCL regular releases, so check there before you start copy & pasting the code. The list of tutorials below is
pointclouds.org
위 사이트에서 자세한 내용을 볼 수 있다
PCD(Point Cloud Data)
여러 데이터 포맷으로 사용 가능하다
-x,y,z 정보만을 가진 *.txt 포맷
-header 정보(size, type, points 수 등) + x,y,z정보를 가진 *.pcd 포맷
'공부 > Point Cloud 공부' 카테고리의 다른 글
| RANSAC (0) | 2020.09.04 |
|---|---|
| Noise filtering, Outlier removal (0) | 2020.09.03 |
| Voxel (1) | 2020.09.02 |